

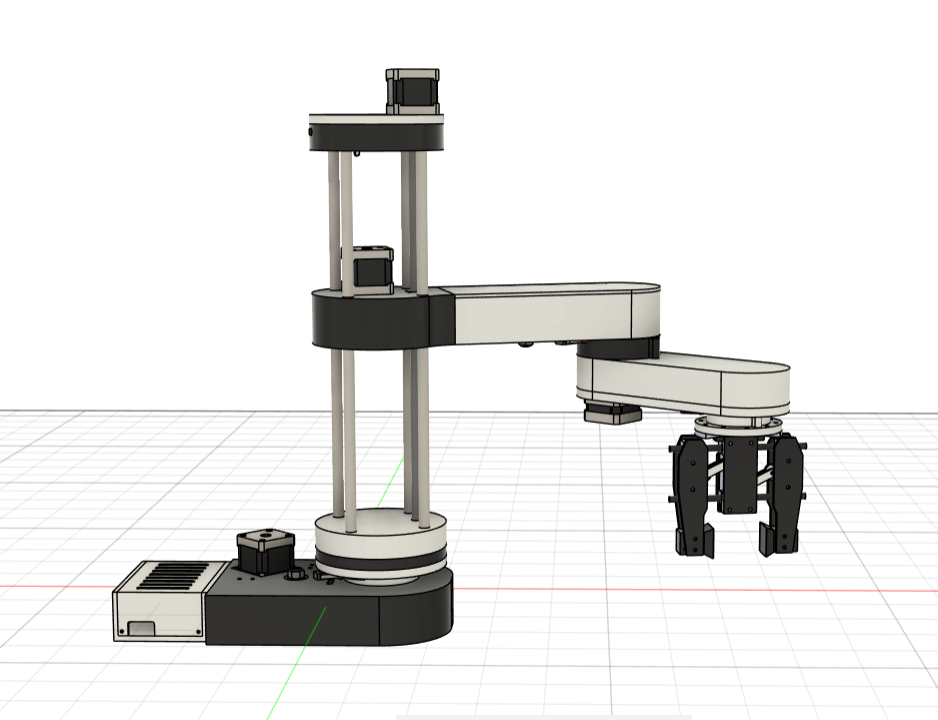
AI-Powered SCARA Robot for Automated Sorting
A low-cost, high-performance SCARA robot designed to automate repetitive sorting tasks in small to medium-sized enterprises (MSMEs).
Demo Video:
Key Hardware:
Know More →
| Component | Model |
|---|---|
| Microcontroller | STM32, Raspberry Pi |
| Vision System | Raspberry Pi Camera |
| Actuators | Stepper Motors, Servos |


:max_bytes(150000):strip_icc():format(webp)/what-is-a-sump-pump-1824760-01-209848f084654b6d9136f86c5513d803.jpg)





_page-0001.jpg)

